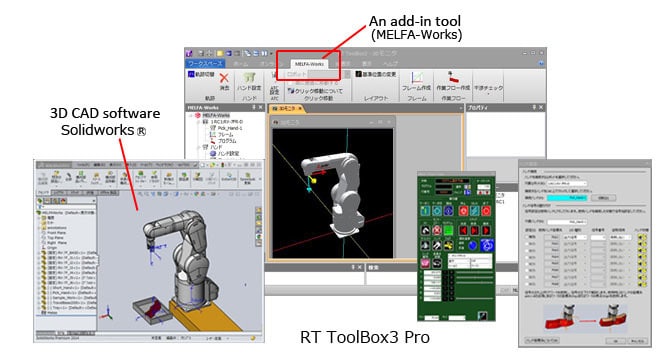
Did you know that RT-Toolbox3 software comes with simulation capabilities? This powerful tool can be helpful in designing the workspace and EOAT (End Of Arm Tooling). Objects or 3D CAD files can be inserted into the workspace to help find interference issues before making tooling. This can save you thousands of dollars.
This is a video output from RT-Toolbox3 software…
This is a sample code that could be used for simulating a RH-3CH SCARA Robot.
Easy MELFA-Basic programming language.
*Start
Mov Ppick1, 10 “Move to 10mm above Pick point”
Mov Ppick1 “Move to Pick point”
Dly 0.05 “Delay to simulate vacuum ON”
Mov Ppick1, 10 “Move to 10mm above Pick point”
Mov Pplace1, 10 “Move to 10mm above Place point”
Mov Pplace1 “Move to Place point”
Dly 0.05 “Delay to simulate vacuum OFF”
Mov Pplace1, 10 “Move to 10mm above Place point”
GoTo *Start “Jump to Beginning and Repeat”
Using the software these positions were recorded in the program
Ppick1 340.000 150.001 48.000 0.000 0.000 0.000 4 0
Pplace1 340.000 -150.001 48.000 0.000 0.000 0.000 4 0
If you have a project you’d like us to simulate, give us a call.